- 17:32 1405/2/24
- تکنولوژی پرواز
صفحه پیکربندی/تنظیم
همانطور که از نامش پیداست، این قسمت جایی است که مدیر Pixhawk هواپیما را پیکربندی و تنظیم میکند. از آنجایی که برخی از این منوها فقط با طرحبندی پیشرفته در دسترس هستند، ابتدا بخش Planner را بررسی خواهیم کرد (که به شما امکان دسترسی به تمام ویژگیهای پیشرفته را میدهد).
Planner
تصویر زیر گزینههای مربوط به برگه Planner را نشان میدهد. این قسمتی است که ما
خود نرمافزار Mission Planner را پیکربندی میکنیم:
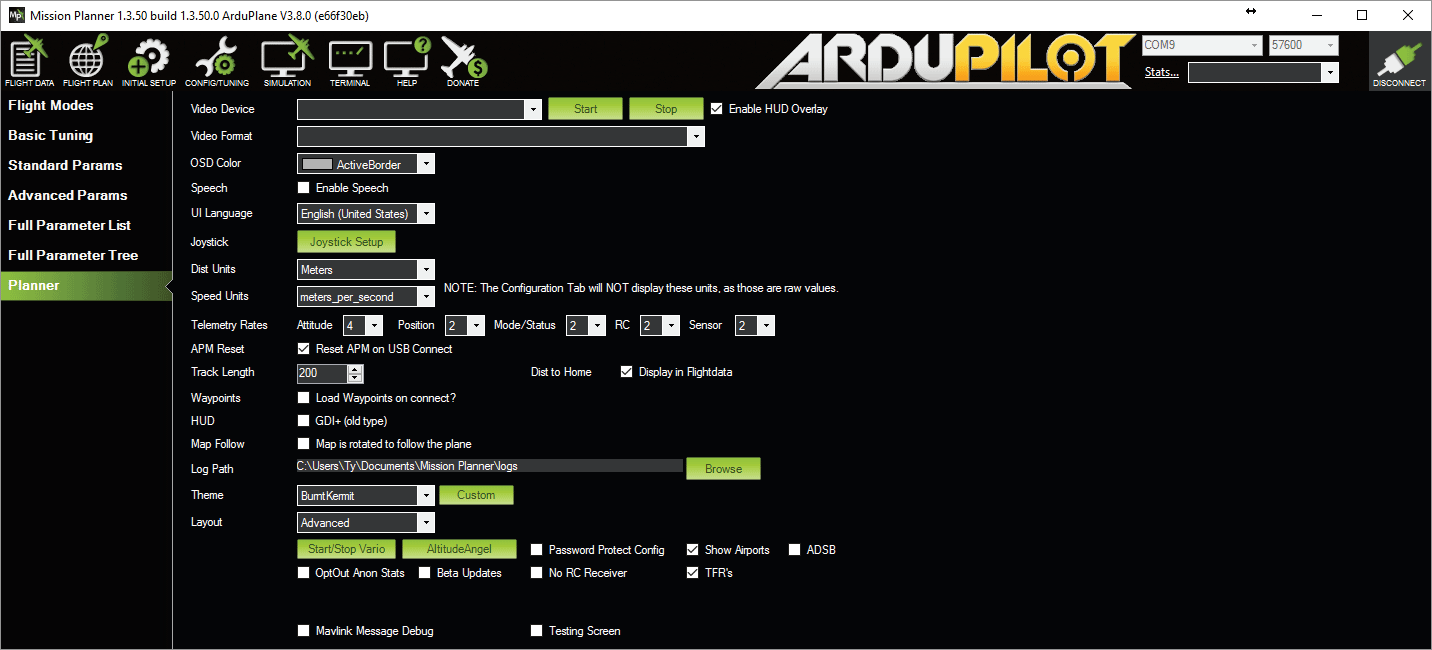
گزینههای زیادی برای راهاندازی Mission Planner در ایستگاه کنترل زمینی شما وجود دارد. بیایید نگاهی به هر یک از آنها بیندازیم:
Video Device : در اینجا میتوانید یک دستگاه ضبط ویدیو (متصل به یک گیرنده ویدیو) را برای نمایش ویدیوی گرفته شده روی پهپاد مشخص کنید. با استفاده از دکمههای شروع و توقف، نمایش ویدیو در پشت HUD روی صفحه Flight Data (به جای افق مصنوعی) شروع و متوقف میشود.
Video Format : این فرمت ویدیوی ورودی را مشخص میکند.
OSD Color : این به شما امکان میدهد رنگ همه موارد نمایش داده شده در HUD را تنظیم کنید.
Speech : این قابلیت بازخورد صوتی را فعال میکند. در اینجا ایستگاه کنترل زمینی شما با استفاده از یک موتور تبدیل متن به گفتار، خطاها و تغییرات حالت را اعلام میکند.
UI Language : این زبان رابط Mission Planner را تنظیم میکند.
Joystick : این صفحه تنظیمات را فعال میکند تا از جویاستیکهای بازی مبتنی بر کامپیوتر برای هدایت وسیله نقلیه شما به جای یک کنترلکننده رادیویی استاندارد استفاده کند.
Dist Units : این واحدها، واحدهای اندازهگیری رابط Mission Planner (امپریال، متریک و غیره) را تنظیم میکنند.
Speed Units : این واحدها، واحدهای اندازهگیری HUD را در طول پرواز، از نظر سرعت (فوت بر ثانیه، متر بر ثانیه و غیره) تنظیم میکنند.
این موضوع تاثیری بر پیکربندی واحدهای اندازهگیری سرعت نخواهد داشت. این فقط برای نمایش همزمان اطلاعات تلهمتری در حین استفاده از خودرو است.
Telemetry Rates : این نرخهایی است که با آنها دادههای تلهمتری در Mission Planner در حالت شبیهسازی بهروزرسانی میشوند.
APM Reset : این یک کادر انتخاب است که نشان میدهد آیا APM هنگام اتصال کابل USB تنظیم مجدد میشود یا خیر. این تنظیم مجدد پارامترهای پیشفرض نیست، بلکه صرفاً یک راهاندازی مجدد سختافزار است.
Track Length : این مسافتی (برحسب متر) است که مسیر پروازی که Pixhawk پیموده است، روی نقشه ماهوارهای در صفحه Flight Data نمایش داده میشود.
Waypoints : این نشان میدهد که آیا نقاط مسیر ذخیره شده در دستگاه Pixhawk در هنگام اتصال در Mission Planner بارگذاری میشوند یا خیر.
HUD: این یک کادر انتخاب است که نشان میدهد آیا از openGL استفاده شده است (بدون علامت) یا از GDI+ برای نمایش اطلاعات HUD استفاده شده است (علامت زده شده). اگر نمیدانید این پروتکلها برای نمایش تصاویر لایهای چیست، آن را بدون علامت بگذارید (زیرا اکثر کامپیوترها با openGL سازگار هستند).
Map Follow : این یک کادر انتخاب است که نشان میدهد آیا نقشه با جهت شمال رو به بالا روی صفحه باقی میماند (بدون علامت) یا نقشه برای مطابقت با جهت وسیله نقلیه چرخانده میشود (علامت زده شده).
Log Path : این مکانی در رایانه است که فایلهای گزارش در آن ذخیره میشوند.
Theme : این تم رنگی برای رابط Mission Planner است.
Layout : این پارامتر یک کلید است. به طور پیشفرض، روی پایه تنظیم شده است. با تغییر به حالت پیشرفته، به گزینههای پارامترهای پیشرفته، لیست کامل پارامترها و درخت کامل پارامترها در صفحه پیکربندی/تنظیم دسترسی پیدا میکنید. همچنین به صفحات شبیهسازی و ترمینال دسترسی پیدا میکنید.
Additional buttons and checkboxes : تقریباً به طور گیجکنندهای در بخش طرحبندی، پارامترهای اضافی وجود دارد که هیچ ارتباطی با طرحبندی ندارند.
اینها به شرح زیر هستند:
* Start/Stop Vario : این ویژگی، ویژگیهای متغیرسنج را شروع و متوقف میکند. متغیرسنجها برای گلایدرها مفید هستند. آنها فشار هوا و نرخ ارتفاع را حس میکنند تا میزان نیروی بالابری که هواپیما تجربه میکند را اندازهگیری کنند. تأثیر نهایی این است که خلبان گلایدرها راحتتر میتوانند با گلایدرها به دمای ترمال برسند و ارتفاع بگیرند.
* AltitudeAngel: این مورد به ویژه در ایالات متحده مفید است. AltitudeAngel روی نقشه شما یک پوشش نمایش میدهد که فضای هوایی محدود را نشان میدهد. این به شما کمک میکند تا از دردسر با FAA در امان بمانید، اما نباید به عنوان تنها منبع خود به آن اعتماد کنید. شما باید قبل از هر پرواز، NOTAMS و نمودارهای مقطعی FAA را بررسی کنید تا مطمئن شوید که هیچ محدودیت موقت یا فضای هوایی محدود دیگری را که ممکن است در AltitudeAngel مستند نشده باشد، نقض نمیکنید.
* Password Protect Config : این به شما امکان میدهد پیکربندی خود را از تغییرات توسط اشخاص ثالث از طریق رمز عبور محافظت کنید.
* Show Airports : این فرودگاهها را روی نقشه شما نمایش میدهد.
* ADSB: ADSB پروتکلی برای تشخیص سایر هواپیماها و بردارهای سفر آنها است. اگر گیرنده ADSB دارید، این امکان مشاهده هر هواپیمایی را در منطقه که از فرستنده ADSB استفاده میکند، فراهم میکند. باید توجه داشته باشید که این فقط برای عملکرد گیرنده است. پهپاد شما در صفحههای ADSB هواپیماهای دیگر ظاهر نمیشود. برای این کار، به یک فرستنده ADSB روی پهپاد خود نیاز دارید.
* Opt Out Anon State:
3D Robotics تجزیه و تحلیلهای ناشناس از ماژولهای Pixhawk خود را جمعآوری میکند. این کادر انتخاب، انتقال دادههای شما به 3D Robotics را لغو میکند.
* Beta Updates : وقتی Mission Planner راهاندازی میشود، این کادر انتخاب به Mission Planner اجازه میدهد تا بهروزرسانیها را که هنوز در مرحله آزمایش بتا هستند، اسکن کند. دانلود بهروزرسانیهایی که هنوز به طور کامل آزمایش و منتشر نشدهاند، توصیه نمیشود.
* No RC Receiver : اگر فقط از طریق Mission Planner (با استفاده از لینک تلهمتری و معمولاً جویاستیکها) کنترل میکنید، این کادر انتخاب باید علامت زده شود. همیشه ایده خوبی است که یک گیرنده RC به عنوان پشتیبان داشته باشید، حتی اگر از آن استفاده نمیکنید.
* TFRs : این شامل نمایش محدودیتهای پرواز موقت میشود که 3D Robotics از طریق نمای نقشه از آنها آگاه است. باز هم، درست مانند AltitudeAngel، نباید به این به عنوان تنها منبع اطلاعات خود تکیه کنید.
* Mavlink Message Debug : این پنجره اشکالزدایی مربوط به پیامهای Mavlink را نشان میدهد. اگر در حال طراحی میانافزار سفارشی برای Pixhawk هستید، این گزینه بسیار مفید است.
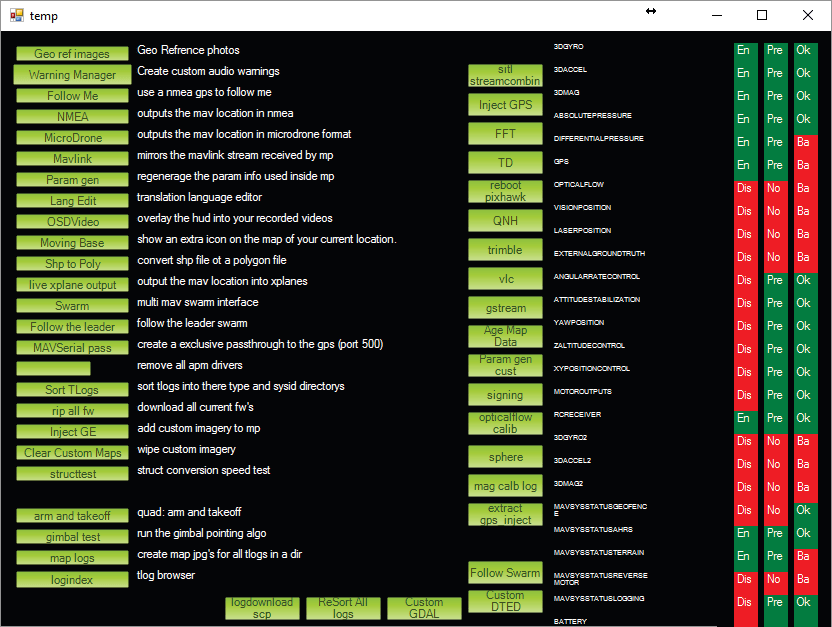
* Testing Screen : این یک رابط کاربری بسیار مفید برای عیبیابی Pixhawk است. در اینجا میتوانید دادهها را خروجی بگیرید و با یک نگاه ویژگیهای فعال/غیرفعالشده را بررسی کنید. تصویر زیر صفحه تست را نشان میدهد:
حالتهای پرواز
این برگه عملکردی مشابه برگه حالتهای پرواز در صفحه تنظیمات اولیه دارد. این برگه به شما امکان میدهد تا هنگام فعال کردن کلید حالت پرواز روی فرستنده، حالتهای پرواز فعال را تنظیم کنید.