- 10:29 1405/3/12
- تکنولوژی پرواز
تنظیمات ستاپ
صفحه تنظیم به شما امکان میدهد تنظیماتی را روی وسیله نقلیه خود پیکربندی کنید که ویژگیهای اساسی پرواز را کنترل میکنند. جزئیات بسته به نوع پرواز متفاوت است:
تنظیم آردوکوپتر
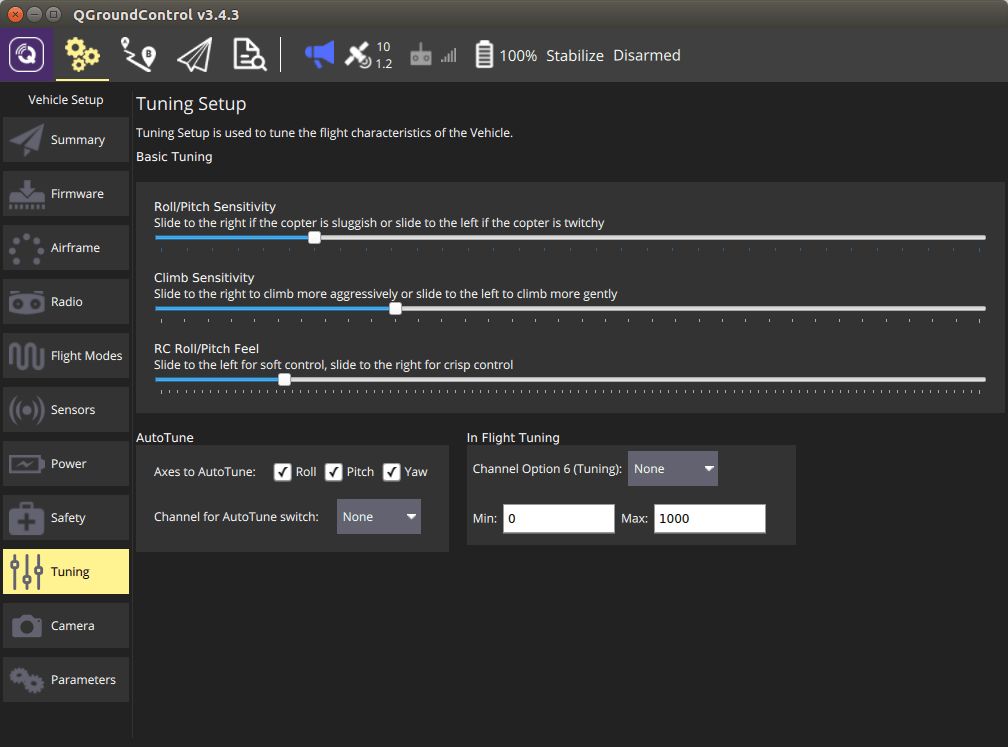
تنظیم اولیه
با حرکت دادن اسلایدر مورد نظر به چپ یا راست، ویژگیهای پرواز را تنظیم کنید.
تنظیم خودکار
از تنظیم خودکار برای تنظیم خودکار پارامترهای سرعت استفاده میشود تا بالاترین پاسخ را بدون جهش قابل توجه ارائه دهد.
انجام تنظیم خودکار:
محورهایی را که میخواهید تنظیم کنید انتخاب کنید.
نکته:
تنظیم همزمان همه محورها میتواند زمان قابل توجهی طول بکشد، که ممکن است باعث تمام شدن باتری شما شود. برای جلوگیری از این امر، فقط یک محور را در یک زمان تنظیم کنید.
AutoTune را به یکی از کلیدهای فرستنده خود اختصاص دهید. قبل از پرواز مطمئن شوید که کلید در حالت پایین قرار دارد.
کوپتر را بلند کنید و در حالت AltHold قرار دهید.
AutoTune را با کلید فرستنده خود روشن کنید.
کوپتر برای چند دقیقه حول محورهای مشخص شده میچرخد.
پس از اتمام AutoTune، هلیکوپتر به تنظیمات اصلی خود باز میگردد.
کلید AutoTune را به حالت پایین و سپس به حالت بالا منتقل کنید تا تنظیمات جدید را آزمایش کنید.
کلید AutoTune را به حالت پایین منتقل کنید تا تنظیمات قبلی را آزمایش کنید.
برای ذخیره تنظیمات جدید، در حالی که کلید AutoTune در حالت بالا قرار دارد، فرود بیایید و آن را خلع سلاح کنید.
توجه:
از آنجایی که AutoTune در AltHold انجام میشود، هلیکوپتر شما باید از قبل تنظیماتی داشته باشد که حداقل در AltHold قابل پرواز باشد. شما میتوانید در هر زمانی با برگرداندن کلید AutoTune به پایین، AutoTune را لغو کنید.
شما میتوانید در هر زمانی در طول AutoTune با استفاده از فرستنده خود، موقعیت هلیکوپتر را تغییر دهید.
تنظیم در حین پرواز
این یک گزینه پیشرفته است که به شما امکان میدهد یک پارامتر کنترل پرواز را با استفاده از یکی از کانالهای صفحه گردان فرستنده خود تنظیم کنید. گزینه کنترل را از منوی کشویی انتخاب کنید و حداقل/حداکثر مقادیری را که میخواهید به صفحه گردان اختصاص دهید، مشخص کنید.
تنظیم (PX4)
تنظیم فقط یک بار لازم است و توصیه میشود مگر اینکه از وسیله نقلیهای استفاده کنید که قبلاً توسط سازنده تنظیم شده باشد (و از آن زمان اصلاح نشده باشد).
تنظیم خودکار معمولاً باید برای انواع فریم و کنترلرهایی که از آن پشتیبانی میکنند (چند کوپتر، بال ثابت و وسایل نقلیه بال ثابت هیبریدی VTOL) استفاده شود. رابط کاربری تنظیم همچنین از تنظیم دستی همه کنترلرها پشتیبانی میکند.
در طول تنظیم بدنه، باید فریمی را انتخاب کرده باشید که بیشترین تطابق را با وسیله نقلیه شما داشته باشد. این فریم معمولاً به اندازه کافی خوب تنظیم میشود تا پرواز کند، و همچنین ممکن است به اندازه کافی خوب تنظیم شده باشد تا بتواند اتوتیونینگ را اجرا کند.
اتوتیونینگ
تنظیم خودکار، فرآیند تنظیم کنترلکنندههای سرعت و وضعیت PX4 را که مهمترین کنترلکنندهها برای پرواز پایدار و واکنشپذیر هستند، خودکار میکند (تنظیمات دیگر بیشتر "اختیاری" هستند).
این راهنما نحوهی استفادهی پیشفرض از این ویژگی را نشان میدهد. اطلاعات و پیکربندی بیشتر را میتوانید در راهنمای تنظیم خودکار PX4 (راهنمای کاربر PX4) بیابید.
تست پیش تنظیم خودکار
تنظیم خودکار در حین پرواز انجام میشود. وسیله نقلیه باید بتواند پرواز کند و قبل از اجرای تنظیم خودکار، خود را به طور مناسب تثبیت کند. این تست تضمین میکند که وسیله نقلیه میتواند با خیال راحت در حالتهای کنترل موقعیت پرواز کند.
برای اطمینان از پایداری کافی وسیله نقلیه برای تنظیم خودکار:
1- یک چک لیست ایمنی قبل از پرواز معمولی را انجام دهید تا مطمئن شوید منطقه پرواز خالی و فضای کافی دارد.
2- بلند شدن و آماده شدن برای آزمایش
چند کوپتر: در حالت ارتفاع یا حالت تثبیت شده، بلند شوید و در ارتفاع ۱ متری از سطح زمین معلق بمانید.
حالت بال ثابت: در حالت موقعیت یا حالت ارتفاع، با سرعت کروز بلند شوید و پرواز کنید.
3- از میله رول فرستنده RC برای انجام مانور زیر استفاده کنید و وسیله نقلیه را فقط چند درجه کج کنید: به چپ بچرخید > به راست بچرخید > به مرکز (کل مانور باید حدود ۳ ثانیه طول بکشد). وسیله نقلیه باید در عرض ۲ نوسان خود را تثبیت کند.
4- مانور را تکرار کنید و در هر تلاش با دامنههای بزرگتر کج شوید. اگر وسیله نقلیه بتواند خود را در عرض ۲ نوسان در حدود ۲۰ درجه تثبیت کند، به مرحله بعدی بروید.
5- همان مانورها را تکرار کنید، اما در محور شیب. همانطور که در بالا ذکر شد، با زوایای کوچک شروع کنید و قبل از افزایش شیب، تأیید کنید که وسیله نقلیه میتواند خود را در عرض ۲ نوسان تثبیت کند.
اگر پهپاد بتواند خود را در عرض ۲ نوسان تثبیت کند، برای روش تنظیم خودکار آماده است. در غیر این صورت، به راهنمای کاربر PX4 > تنظیم خودکار > عیبیابی مراجعه کنید.
روش تنظیم خودکار
توالی تنظیم خودکار باید در یک منطقه پرواز امن و با فضای کافی انجام شود. حدود ۴۰ ثانیه (بین ۱۹ تا ۶۸ ثانیه) طول میکشد. برای بهترین نتیجه، توصیه میکنیم آزمایش را در شرایط آب و هوایی آرام انجام دهید.
آماده باشید تا با حرکت دادن دستههای کنترلکننده RC، فرآیند تنظیم خودکار را متوقف کنید.
مراحل آزمایش عبارتند از:
1- آزمایش پیش تنظیم بالا را انجام دهید.
2- برخاستن با استفاده از کنترل RC و آماده شدن برای آزمایش:
مولتی کوپتر: برخاستن با استفاده از کنترل از راه دور در حالت ارتفاع. وسیله نقلیه را در فاصله ایمن و در چند متری بالای زمین (بین ۴ تا ۲۰ متر) معلق نگه دارید.
VTOL در حالت بال ثابت: پس از پرواز با سرعت کروز، حالت نگه داشتن را فعال کنید. این کار هواپیما را به پرواز دایرهای در ارتفاع و سرعت ثابت هدایت میکند.
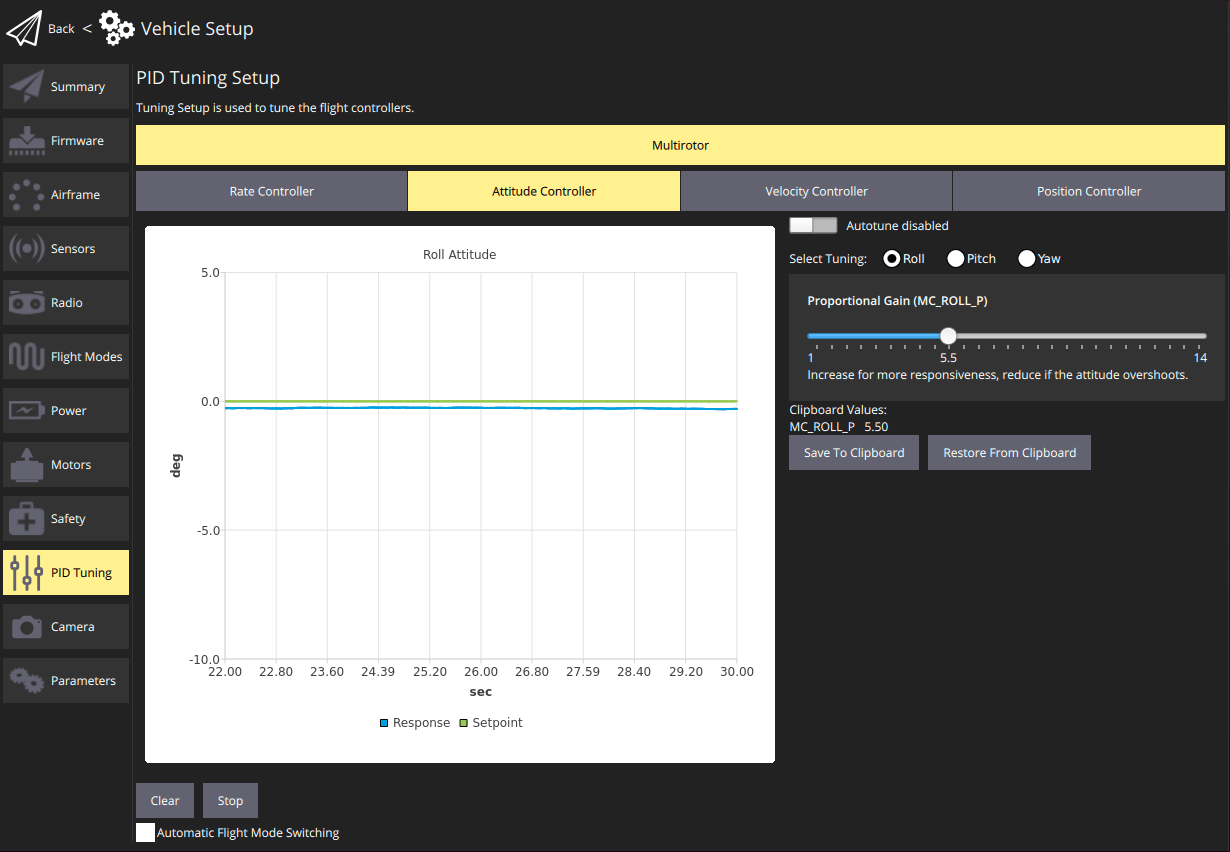
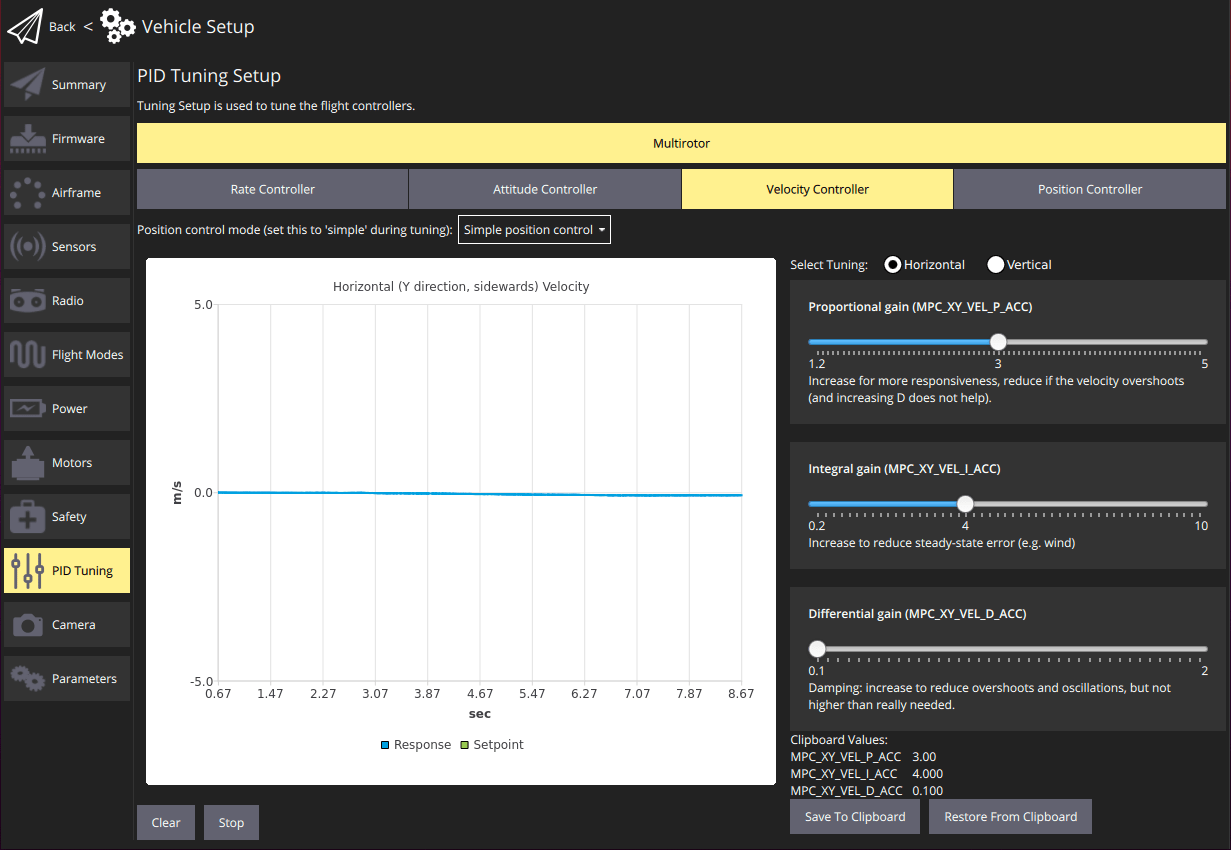
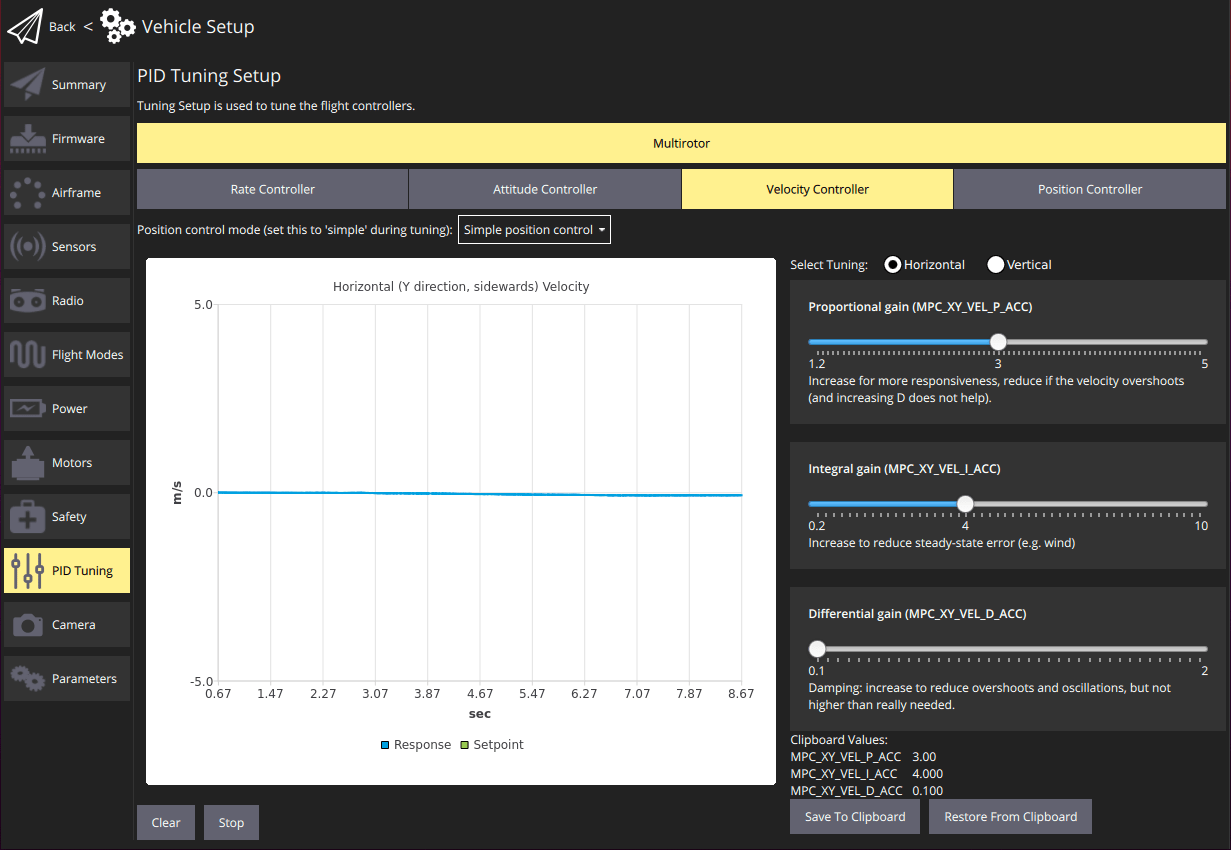
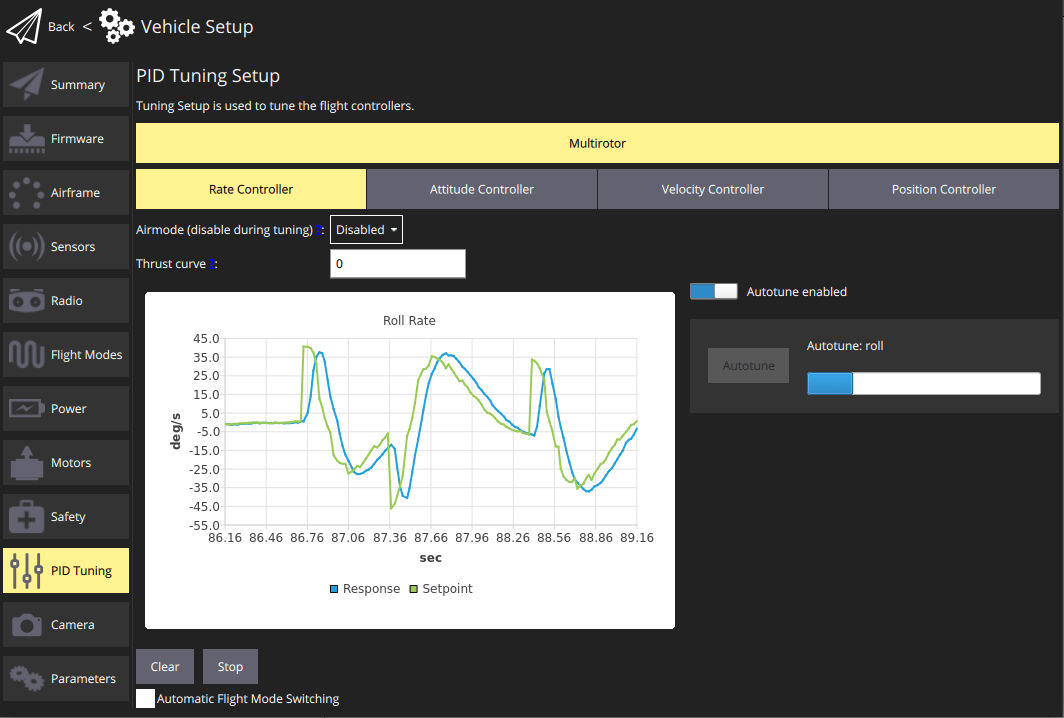
3- در QGroundControl، منو را باز کنید: تنظیمات وسیله نقلیه > تنظیم PID
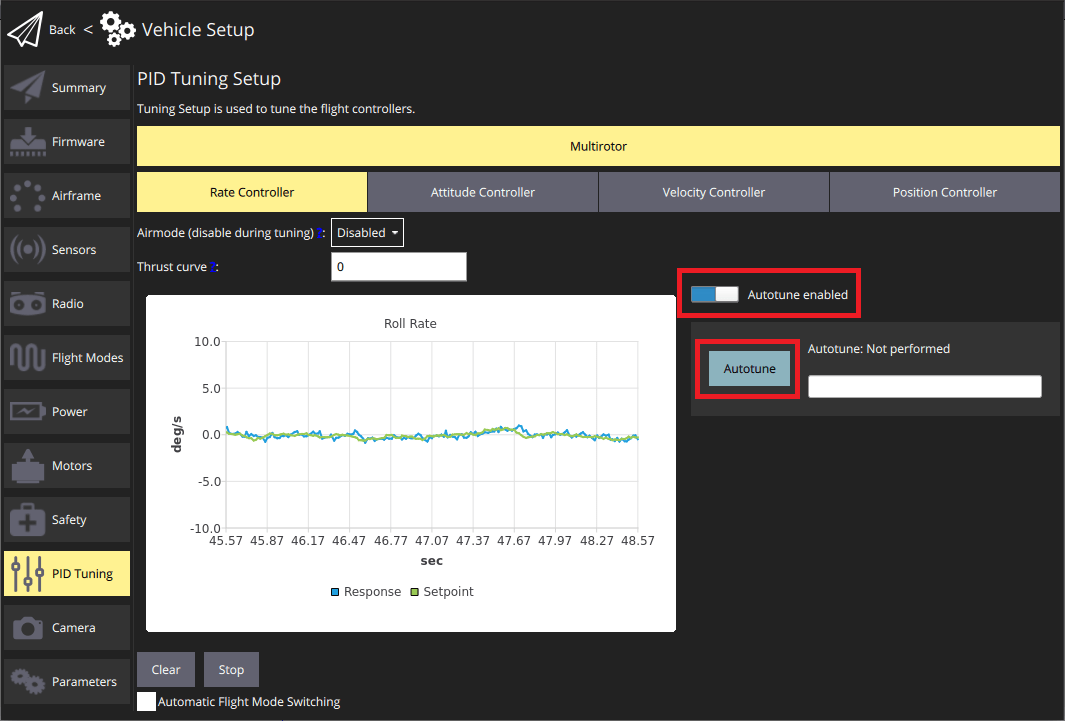
4- یکی از زبانههای Rate Controller یا Attitude Controller را انتخاب کنید. مطمئن شوید که دکمه Autotune enabled فعال است (این کار دکمه Autotune را نمایش میدهد و انتخابگرهای تنظیم دستی را حذف میکند).
5- حرکت دادن جویاستیکها را متوقف کنید و روی دکمه Autotune کلیک کنید. پنجره هشدار را بخوانید و برای شروع تنظیم، روی OK کلیک کنید.
6- پهپاد ابتدا شروع به انجام حرکات سریع غلتش و به دنبال آن حرکات پیچ و انحراف میکند. پیشرفت در نوار پیشرفت، کنار دکمه Autotune نشان داده شده است.
7- اعمال تنظیم:
بال ثابت: تنظیم بلافاصله/به طور خودکار در پرواز اعمال و آزمایش میشود (به طور پیشفرض). سپس PX4 یک آزمایش ۴ ثانیهای انجام میدهد و در صورت تشخیص مشکل، تنظیم جدید را برمیگرداند.
چندکوپترها: برای اعمال پارامترهای تنظیم جدید، به صورت دستی فرود و خلع سلاح شوید. با دقت بلند شوید و به صورت دستی آزمایش کنید که وسیله نقلیه پایدار است.
8- در صورت بروز هرگونه نوسان شدید، فوراً فرود بیایید و دستورالعملهای موجود در راهنمای کاربر PX4 > تنظیم خودکار > عیبیابی را دنبال کنید.
تنظیم دستی
تنظیم دستی در حین پرواز انجام میشود، بنابراین وسیله نقلیه شما باید از قبل به اندازه کافی تنظیم شده باشد تا بتواند با آن پرواز کند (این معمولاً در صورتی است که یک بدنه هوایی پیشفرض مناسب انتخاب کرده باشید).
دستورالعملهای زیر نحوه استفاده از رابط کاربری تنظیم دستی را توضیح میدهند. این رابط کاربری به گونهای طراحی شده است که در کنار راهنماهای تنظیم دستی PID PX4 قابل خواندن/استفاده باشد، که نکات دقیقتری در مورد انواع اندازههای گام برای استفاده هنگام تغییر مقادیر PID ارائه میدهند.
در مرور کلی:
1- برخاستن با استفاده از کنترل RC و آماده شدن برای آزمایش:
چند کوپتر: برخاستن با استفاده از کنترل از راه دور در حالت ارتفاع. وسیله نقلیه را در فاصله ایمن و در چند متری بالای زمین (بین ۴ تا ۲۰ متر) معلق نگه دارید.
بال ثابت: پس از پرواز با سرعت کروز، حالت نگه داشتن را فعال کنید. این کار هواپیما را به پرواز دایرهای در ارتفاع و سرعت ثابت هدایت میکند.
2- در QGroundControl، منو را باز کنید: تنظیمات وسیله نقلیه > تنظیم PID
3- زبانه کنترل نرخ را انتخاب کنید. مطمئن شوید که دکمه فعالسازی تنظیم خودکار خاموش است.
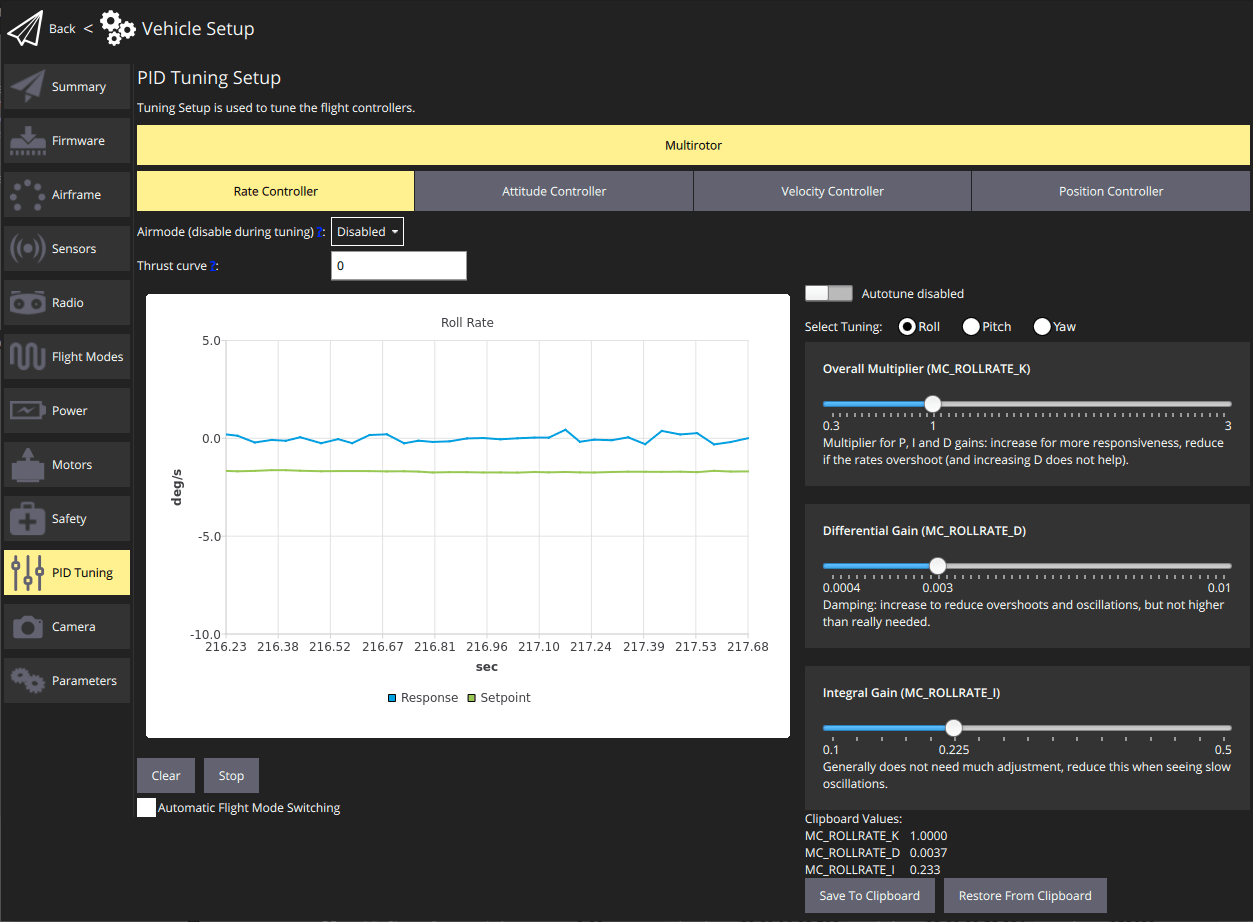
4- محور تنظیم را برای تنظیم انتخاب کنید: Roll، Pitch یا Yaw (هر محور به طور جداگانه تنظیم میشود).
5- با مشاهده ردیابی روی نمودار، وسیله نقلیه را به پرواز درآورید.
مقادیر تنظیم (پارامترها) را برای بهبود ردیابی نشان داده شده روی نمودار با استفاده از نوار لغزنده تنظیم کنید.
مقادیر به طور خودکار ذخیره میشوند، اما میتوانید از دکمههای Save to Clipboard و Restore from Clipboard برای ذخیره آخرین پیکربندی خوب شناخته شده استفاده کنید.
همچنین میتوانید نمودار را با استفاده از دکمههای ارائه شده پاک/متوقف کنید.
6- محورهای دیگر را تنظیم کنید.
7- به کنترلرهای دیگر بروید و این فرآیند را تکرار کنید. تصاویر صفحات تنظیم در زیر نشان داده شده است.