- 17:18 1405/2/24
- تکنولوژی پرواز
میتوانید این فصل را به عنوان مرجعی سریع از رابط کاربری Mission Planner و فهرست پارامترها در نظر بگیرید. در این فصل، ما قصد داریم استفاده از Mission Planner را بررسی کنیم و تمام پارامترهای موجود در فهرست پارامترهای دقیق را توضیح دهیم (در برخی موارد دوباره توضیح دهیم). اگر تا به حال به بنبست رسیدهاید و به دنبال تنظیم آن پارامتر خاص هستید، اینجا جایی است که آن را پیدا خواهید کرد.
در این فصل، مباحث زیر را پوشش خواهیم داد:
رابط کاربری دادههای پرواز
صفحه طرح پرواز
صفحه تنظیمات اولیه
صفحه پیکربندی/تنظیم
صفحه شبیهسازی
ترمینال Mission Planner
رابط کاربری Flight Data
تصویر زیر رابط کاربری Flight Data را برای Mission Planner نشان میدهد:
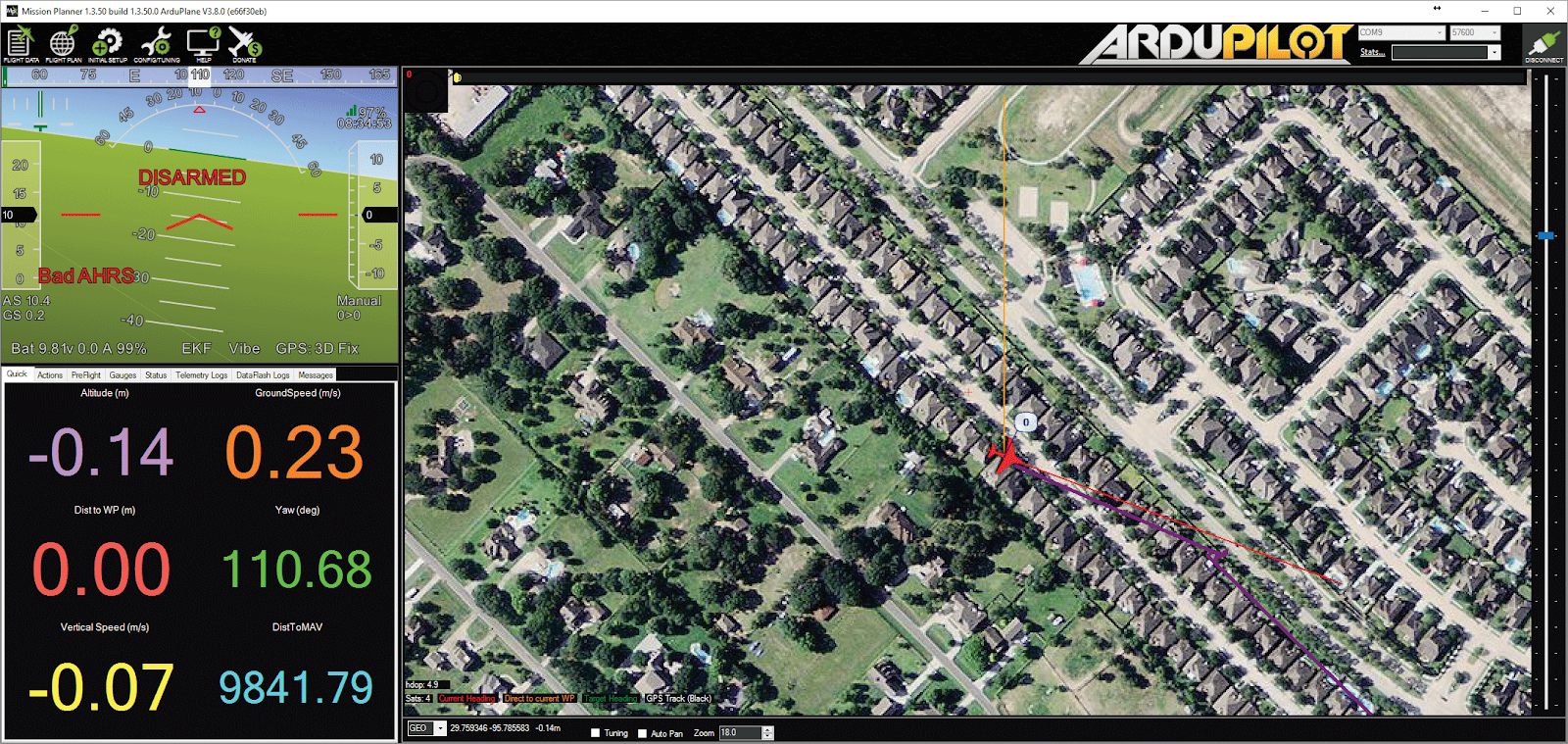
پنجره بالا سمت چپ نمایشگر Heads-up Display (HUD) را نشان میدهد که در آن میتوانید فوراً جهت، ارتفاع و وضعیت هواپیما را تشخیص دهید. پیامهای هشدار به صورت متن قرمز ظاهر میشوند (مانند هشدارهای DISARMED و Bad AHRS که در تصویر میبینیم).
پنجره بزرگ یک نقشه ماهوارهای پیشبینی شده است که مکان هواپیما/چندکوپتر/کاوشگر (در این مورد، یک هواپیمای بال ثابت) را نشان میدهد. یک خط بنفش از هواپیما بیرون زده است که نشان دهنده جهتی است که هواپیما به آن اشاره میکند.
پنجره پایین سمت چپ دادههای فعلی را با چندین زبانه برای مشاهده دادههای ارائه شده در قالبهای مختلف نشان میدهد و حتی سیگنالها را به Pixhawk منتقل میکند. زبانهها به شرح زیر هستند:
Quick : اینها مقادیر عددی دادههای تلهمتری اولیه از وسیله نقلیه هستند.
Actions : این به کاربر اجازه میدهد تا دستوراتی مانند Loiter، Arm و غیره را به Pixhawk ارسال کند.
PreFlight : این یک چک لیست و وضعیت پیش از پرواز را قبل از پرتاب وسیله نقلیه Pixhawk نشان میدهد. رنگ سبز نشاندهندهی اقلامی است که آماده هستند و رنگ قرمز نشاندهندهی اقلامی است که ممکن است نیاز به توجه داشته باشند.
Gauges : این یک نمای آنالوگ با اطلاعات مشابه صفحه سریع را نشان میدهد. این نمای آنالوگ به جای اعداد ساده، از نمایش گرافیکی به شکل گیجهای مجازی استفاده میکند.
Status : این یک نمایش دقیق از تک تک پارامترهای تلهمتری که وسیله نقلیه تجربه میکند، ارائه میدهد.
Telemetry Logs : این به کاربر اجازه میدهد تا گزارشهای پرواز را از Pixhawk به رایانه بارگذاری کند و ماموریت را برای ارزیابی ماموریت کالبد شکافی، دوباره پخش کند.
DataFlash Logs : این برای عیبیابی مشکلات Pixhawk استفاده میشود. اگر در تنظیم یا ماموریتها با مشکل مواجه هستید، این گزارشها میتوانند برای تشخیص خطاها بسیار مفید باشند. همچنین، هنگام درخواست کمک از یک انجمن، اولین سوالی که از شما میپرسند این است که این گزارشها را برای تجزیه و تحلیل ارائه دهید.
Messages : این یک نمای بلادرنگ از ورودیهای گزارش را در هنگام وقوع ارائه میدهد.
صفحه طرح پرواز
تصویر زیر صفحه طرح پرواز (بدون ماموریت تنظیم بال ثابت) را نشان میدهد:
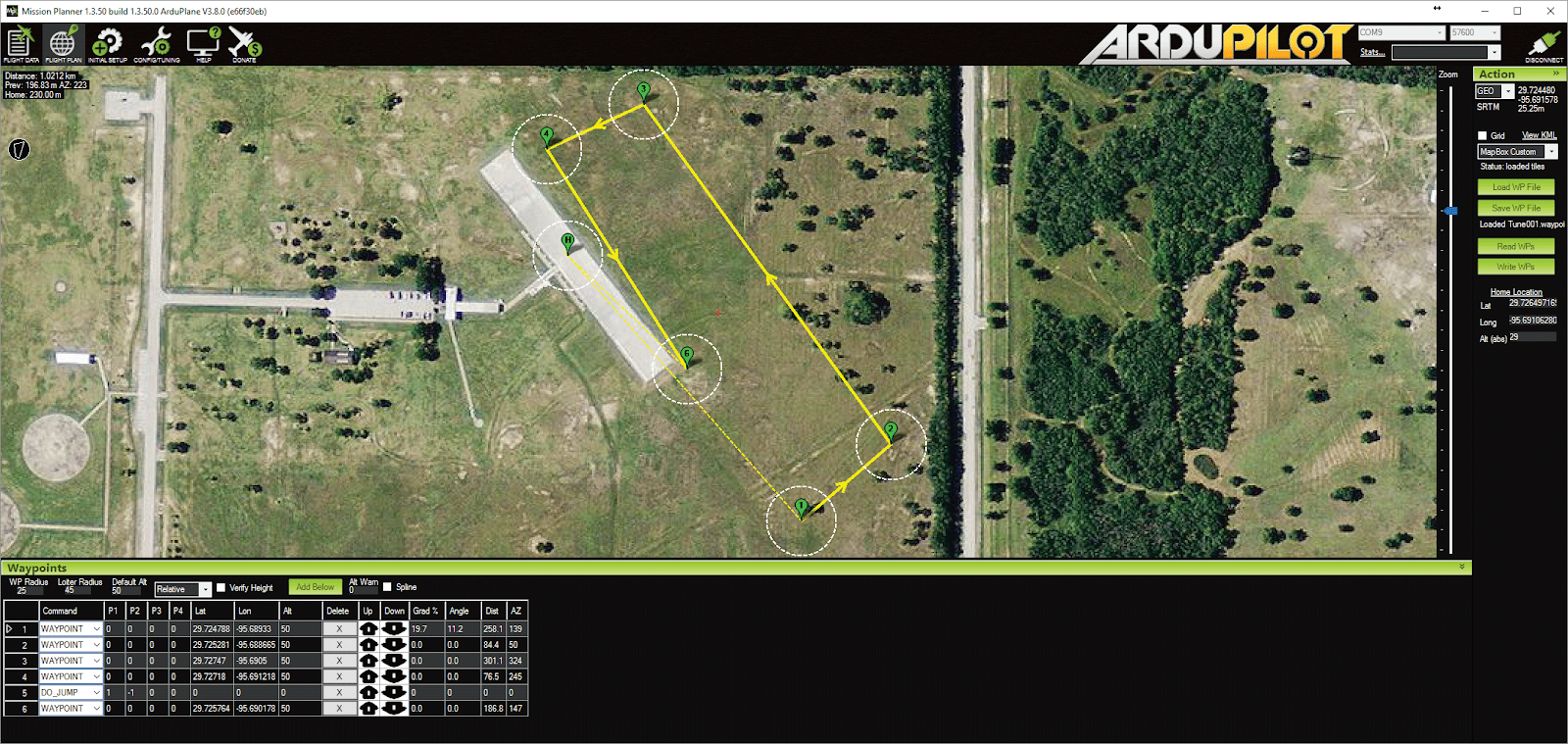
پنجره اصلی، نقشه ماهوارهای منطقه ماموریت را نشان میدهد. خطوط زرد نشان دهنده مسیر مورد نظر وسیله نقلیه هستند، در حالی که دایرههای سفید نشان دهنده منطقه قوس چرخش (شعاع چرخش) میباشند. نشانگرهای سبز نشان دهنده اهداف واقعی نقطه مسیر برای ماموریت هستند.
پنجره پایین نموداری است که تمام پارامترهای ماموریت را نشان میدهد. در این پنجره، میتوانید رویدادهایی (مانند Do Jump که وسیله نقلیه را به یک نقطه مسیر خاص برمیگرداند) اضافه کنید. اگر دوربین شما به Pixhawk متصل است، میتوانید به دوربین بگویید که عکس بگیرد/شروع به ضبط کند. حالتهای پرواز را نیز میتوان تغییر داد (مانند "فرود"). هر دستوری که Pixhawk قادر به اجرای آن است، میتواند با استفاده از این رابط فعال شود.
پنجره سمت راست به شما امکان میدهد ماموریتها را برای استفاده بعدی (در رایانه خود) ذخیره کنید، ماموریتهای قبلی را بارگیری کنید، نوع نقشه ماهوارهای را تغییر دهید. نقشههای مختلف میتوانند جزئیات بیشتری/کمتری داشته باشند و همچنین میتوانند بیشتر/کمتر بهروز باشند. در نهایت، در پایین این پنجره، بخشی وجود دارد که به شما امکان میدهد نقاط مسیر فعلی بارگذاری شده در Pixhawk را بخوانید، یا نقاط مسیر جدیدی را که ایجاد کردهاید بنویسید. برای اجرای ماموریت، باید نقاط مسیر را برای Pixhawk بنویسید. نقطه خانه نیز در اینجا نمایش داده میشود.
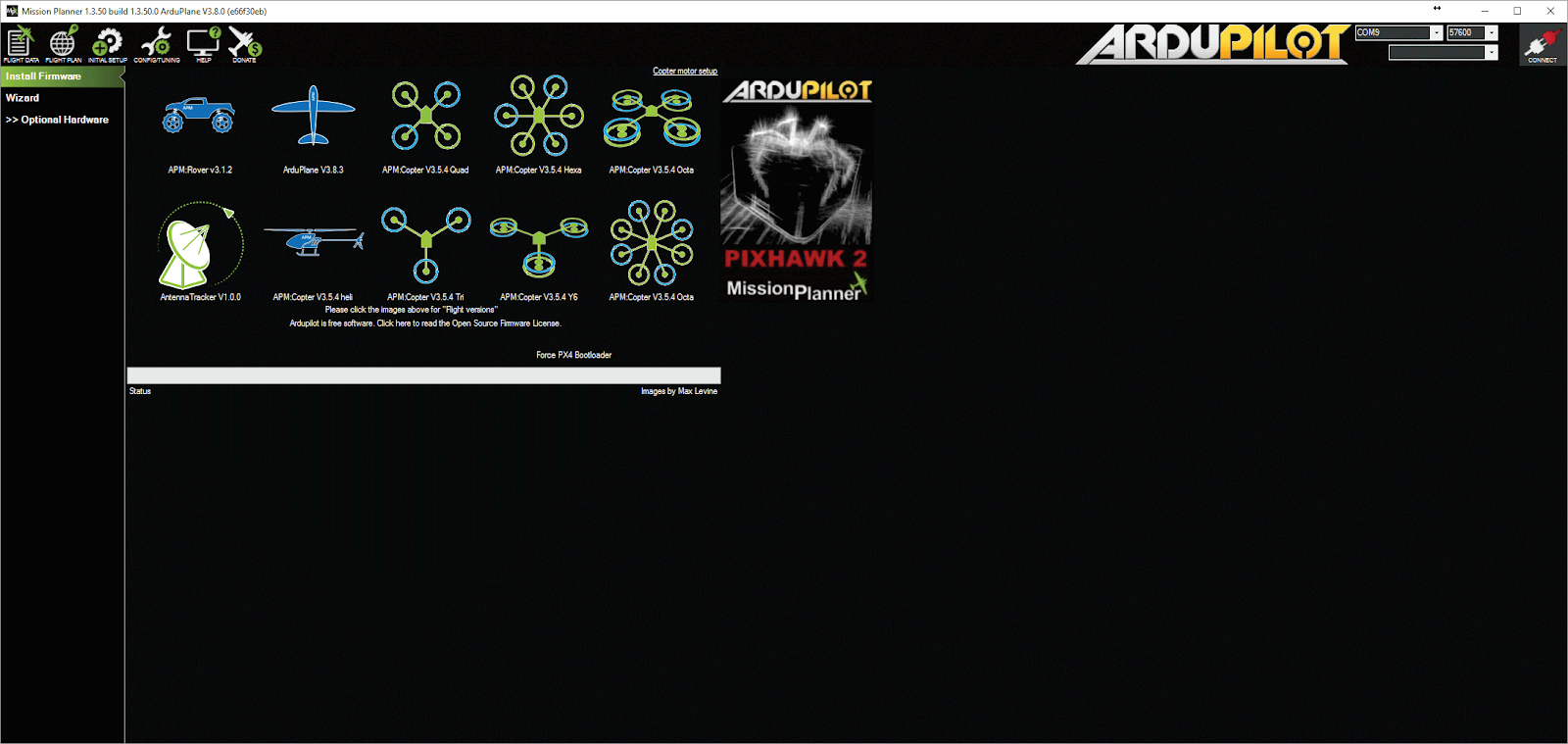
صفحه تنظیمات اولیه
تصویر زیر، تب نصب میانافزار (Install Firmware) در صفحه تنظیمات اولیه را نشان میدهد. این صفحه
به شما امکان میدهد ماژول Pixhawk را برای برنامههای دیگر (مانند Rover) تغییر کاربری دهید:
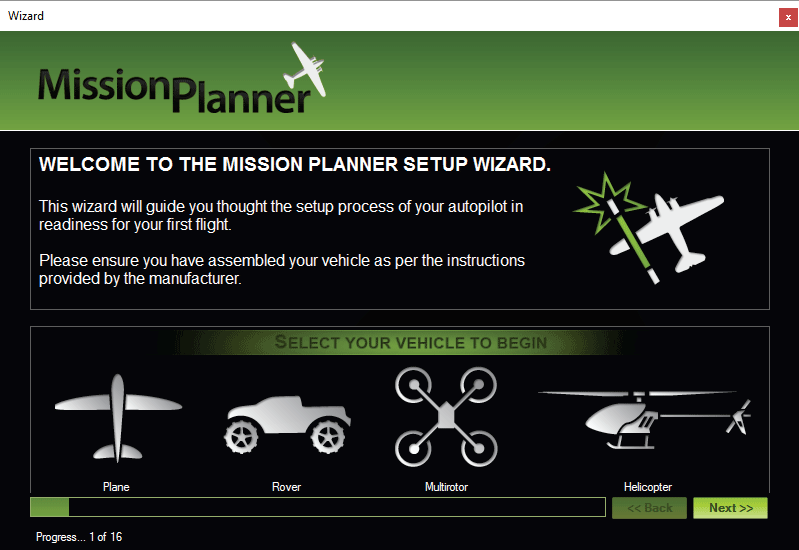
ویزارد
تصویر زیر رابط کاربری را نشان میدهد که هنگام کلیک روی برگه ویزارد ظاهر میشود.
این یک ویزارد پیکربندی گام به گام است که به شما کمک میکند تنظیمات اولیه Pixhawk خود را انجام دهید: