- 12:57 1405/2/20
- تکنولوژی پرواز
این زوایا عبارتند از:
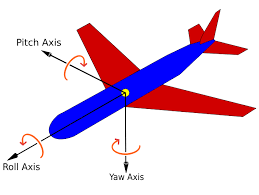
- Pitch Angle (زاویهٔ گام):
- تعریف: زاویهای است که بین محور طولی هواپیما (خطی از دماغه تا دم) و خط افق واقعی (یا خط مرجع زمینی) تشکیل میشود.
- توضیح: وقتی دماغهٔ هواپیما به سمت بالا باشد، زاویه Pitch مثبت است. وقتی دماغه به سمت پایین باشد، زاویه Pitch منفی است. وقتی دماغه در راستای افق باشد، زاویه Pitch صفر است.
- کنترل: Pitch توسط سطوح کنترلی دم افقی (Elevators) یا سطوح مشابه (مانند Elevons در بال دلتا) کنترل میشود. ArduPilot با تنظیم این سطوح، زاویه Pitch را برای حفظ ارتفاع یا تغییر آن (صعود/نزول) تنظیم میکند.
- Roll Angle (زاویهٔ Roll):
- تعریف: زاویهای است که محور طولی هواپیما نسبت به افق، در اطراف محور طولی خود میچرخد.
- توضیح: وقتی یک بال هواپیما بالاتر از بال دیگر قرار میگیرد، هواپیما در حال Roll است. زاویه Roll صفر به معنای این است که هر دو بال در یک ارتفاع نسبت به افق قرار دارند (یعنی هواپیما صاف پرواز میکند).
- کنترل: Roll توسط Ailerons که در لبهٔ عقبی بالها قرار دارند، کنترل میشود. ArduPilot با حرکت دادن نامتقارن Ailerons، هواپیما را به سمت چپ یا راست Roll میدهد. این عمل برای گردش (Turning) هواپیما ضروری است.
- Yaw Angle (زاویهٔ انحراف):
- تعریف: زاویهای است که محور طولی هواپیما نسبت به جهت پرواز (مسیر افقی که هواپیما در حال طی کردن آن است) منحرف میشود. به عبارت دیگر، چرخش دماغه به چپ یا راست حول محور عمودی هواپیما.
- توضیح: وقتی دماغهٔ هواپیما به سمت چپ یا راست میچرخد، بدون اینکه هواپیما غلتش زیادی داشته باشد، زاویه Yaw تغییر میکند.
- کنترل: Yaw معمولاً توسط سکان عمودی دم (Rudder) کنترل میشود. در برخی هواپیماها (مانند بال دلتا یا هواپیماهای بدون دم)، ممکن است از سطوح کنترلی دیگری مانند Rudderons یا کنترل Differential Ailerons/Thrust برای ایجاد اثر Yaw استفاده شود. ArduPilot برای حفظ جهت پرواز و انجام گردشهای دقیق، Yaw را کنترل میکند.
- Angle of Attack (AoA - زاویهٔ حمله):
- تعریف: زاویهای است که بین خط وتر بال (Chord Line) و جهت جریان هوای نسبی (Relative Wind) تشکیل میشود.
- توضیح: این زاویه مستقیماً بر میزان نیروی برآ (Lift) و پسار (Drag) تأثیر میگذارد. AoA صفر به معنای این نیست که نیروی برآ صفر است؛ بلکه به این معنی است که جریان هوا موازی با خط وتر بال است.
- کنترل: AoA به طور مستقیم توسط ArduPilot کنترل نمیشود، بلکه نتیجهٔ ترکیبی از کنترل Pitch (توسط Elevator) و سرعت هواپیما است. ArduPilot سعی میکند AoA را در محدودهٔ بهینه برای تولید نیروی برآ کافی و جلوگیری از واماندگی (Stall) حفظ کند.
- Angle of Glide / Descent Angle (زاویهٔ سر خوردن / زاویهٔ نزول):
- تعریف: زاویهای است که مسیر حرکت هواپیما (هواپیما نسبت به افق) در هنگام پرواز بدون موتور (Gliding) یا با موتور در حالت کاهش ارتفاع، با خط افق تشکیل میدهد.
- توضیح: این زاویه نشاندهندهٔ میزان شیب مسیر پرواز است.
اهمیت این زوایا برای ArduPilot:
ArduPilot یک سیستم کنترل پرواز خودکار است که برای حفظ یا تغییر این زوایا در مقادیر مورد نظر طراحی شده است. برای مثال:
- در حالت “Stabilize” یا “FBWA” (<bos> Firmware Based Attitude): ArduPilot سعی میکند زاویه Roll و Pitch را در مقادیر دلخواه خلبان حفظ کند.
- در حالت “Auto” یا “Guided”: ArduPilot مسیر پروازی مشخصی را دنبال میکند که شامل حفظ یا تغییر کنترل شدهٔ زوایای Pitch، Roll و Yaw برای رسیدن به نقاط مشخص یا انجام مانورهای از پیش تعیین شده است.
- برای جلوگیری از واماندگی (Stall)، ArduPilot باید AoA را در محدودهٔ ایمن نگه دارد.
این زوایا، اساساً “وضعیت” یا “Orientation” هواپیما را در فضا نسبت به افق و جهت حرکتش توصیف میکنند و ArduPilot با استفاده از سنسورهایی مانند IMU (شتابسنج و ژیروسکوپ) و GPS، این زوایا را اندازهگیری کرده و با استفاده از الگوریتمهای کنترلی، سطوح پروازی را تنظیم میکند تا زوایای مورد نظر حفظ شوند.